Good day everyone. I’m new here, i am doing a project. My project is about building a robot that can move around (front and back using a DC motor). The unusual part of my project is that it uses a computer motherboard as the main processing unit instead of PIC. Here’s a list of what i’ve done.
~Got a mini ITX form factor motherboard ( very small computer motherboard, uses window XP, running fine)
~12V battery and DC to DC converter (portable power supply that really works)
~Relay circuit and 6V DC motor (motor driver using L298, tested and it works)
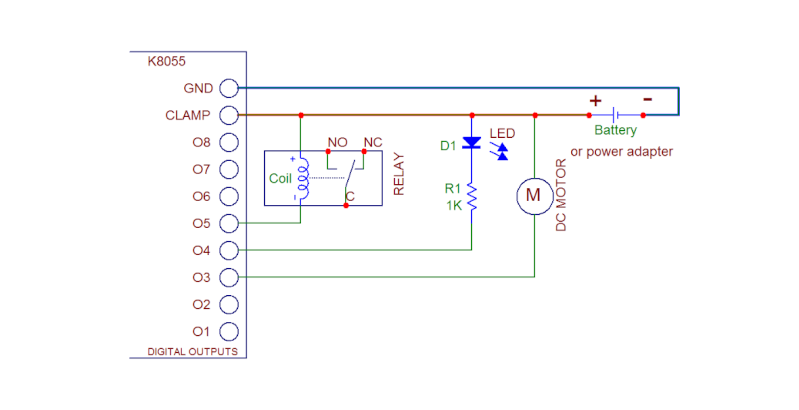
~k8055 (to send output to control the motor through the relay)
~A chassis that holds all the above together.
Once the power button is pressed, the computer is suppose to boot the OS and autorun a program (which i need to write later) that will activate the motor. The objective is to allow the robot to move forward and backward for a certain amount of time that the user desire.
My main problem is the K8055. while testing it using the GUI program in the CD provided, i notice the output voltage of all 8 digital outputs are 0.6V for logic “1” and ground, 0V for logic “0”
Shouldn’t logic 1 be 5V?
0.6V is too low and it can’t start the motor. The L298 motor driver require 5V for logic ‘1’ to turn on the motor.
I’ve tested using the analog output of k8055, the maximum output is 4.5V, and it is enough to turn on the motor.
using Digital multimeter, the voltage at the digital output right before the resistors are 4.5V, after the resistor, the voltage drops to 2.0V, and once passed the LED, the voltage becomes 0.6V. (all voltage shown are with reference to ground of the k8055)
I’ve checked the soldering and the components used, it seems to be ok (the soldering was done by a skillful electronic shop, i doubt they will make any mistake)
is there an option to change the output voltage through software? or my k8055 is defected?
Please help…i’m really close to completing the project, i just need the digital outputs to work.
 ).
).