one leg in the bottom right. Then when I was trying example sketch, the robot was moving in this way: Dropbox - File Deleted - Simplify your life It was very high current - about 2 A. I checked every servos I realized that 2 of them was damaged.
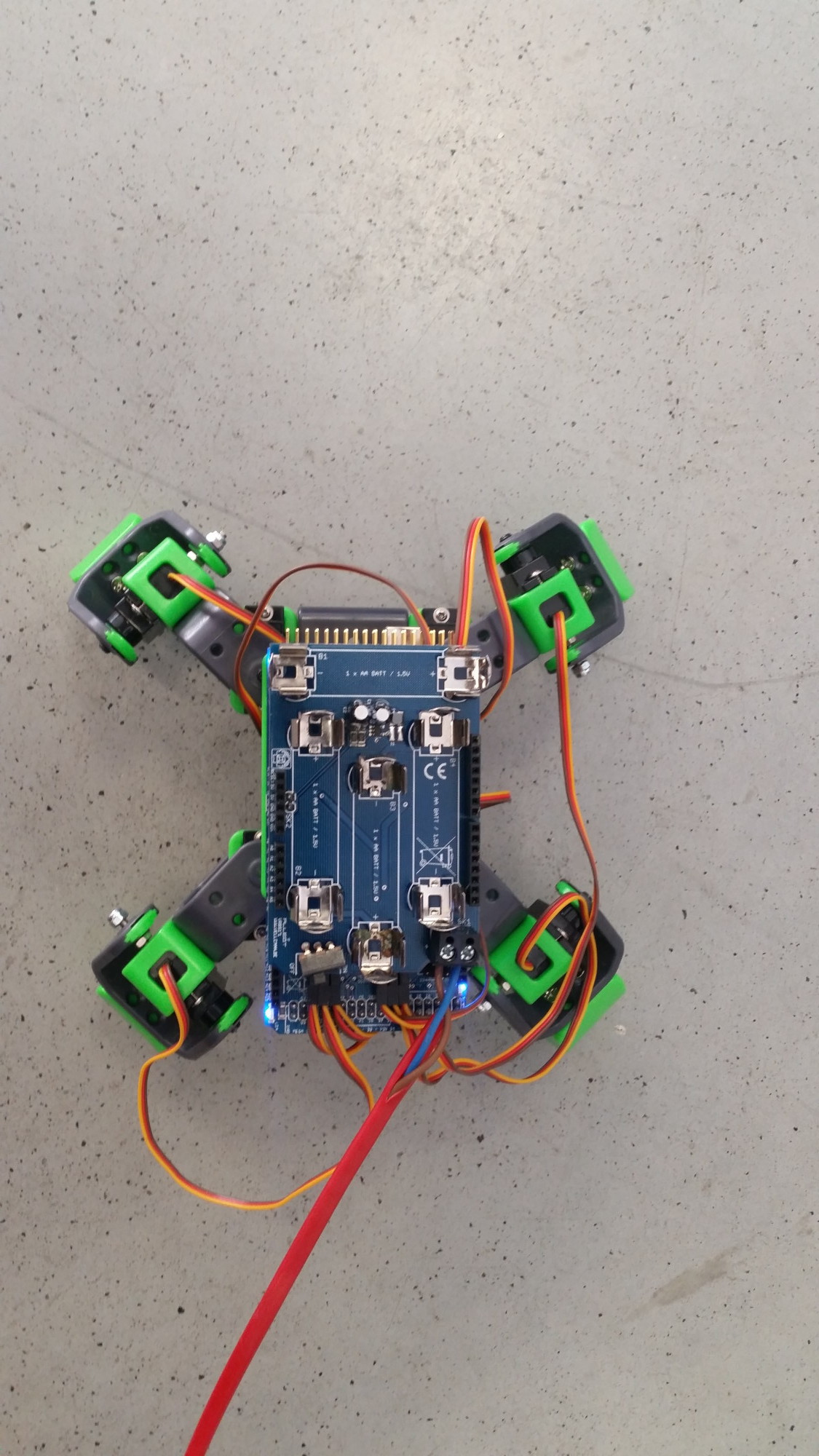
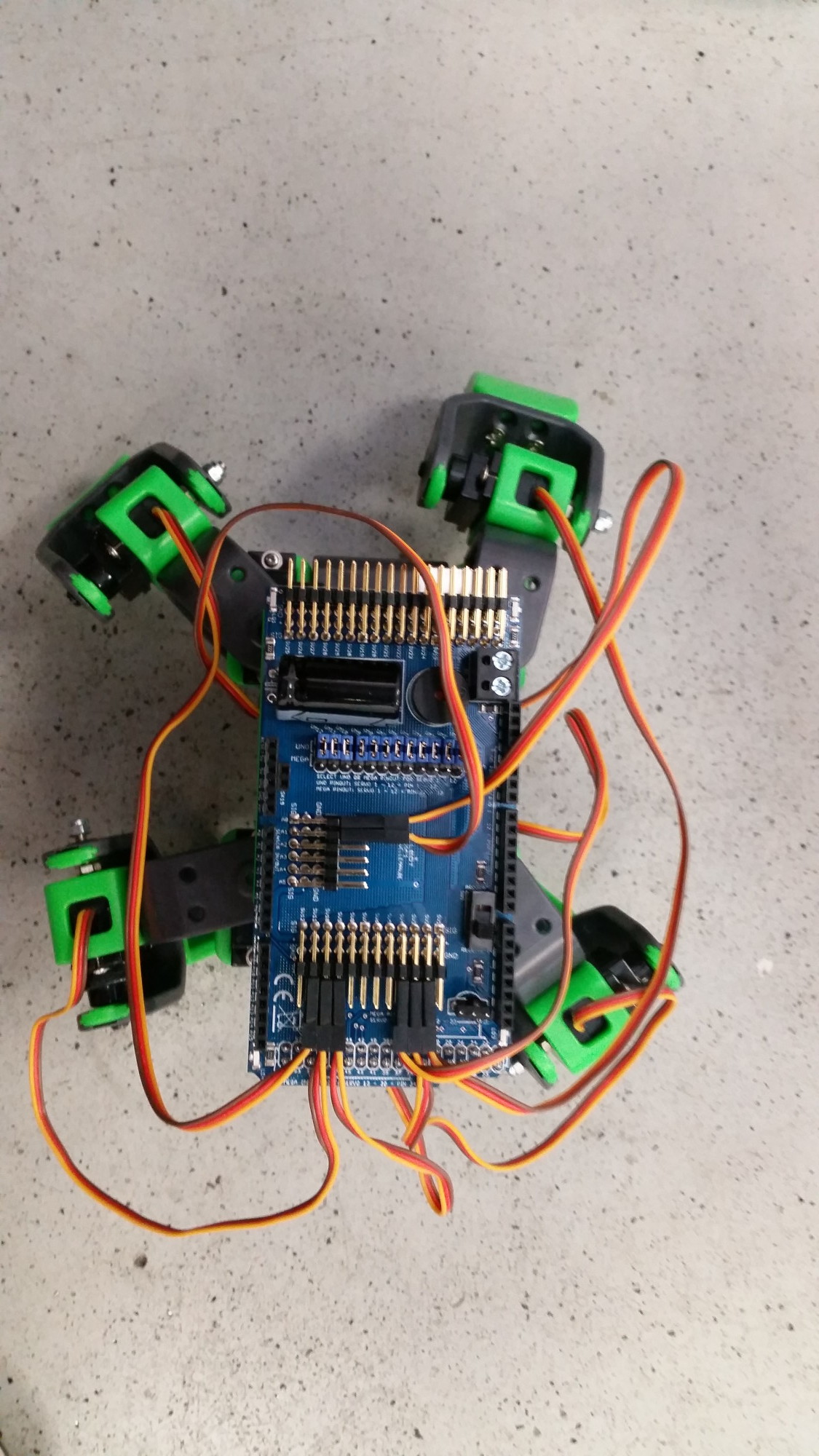
After exchange servos, robot is centering in this way: (pic, pic3).
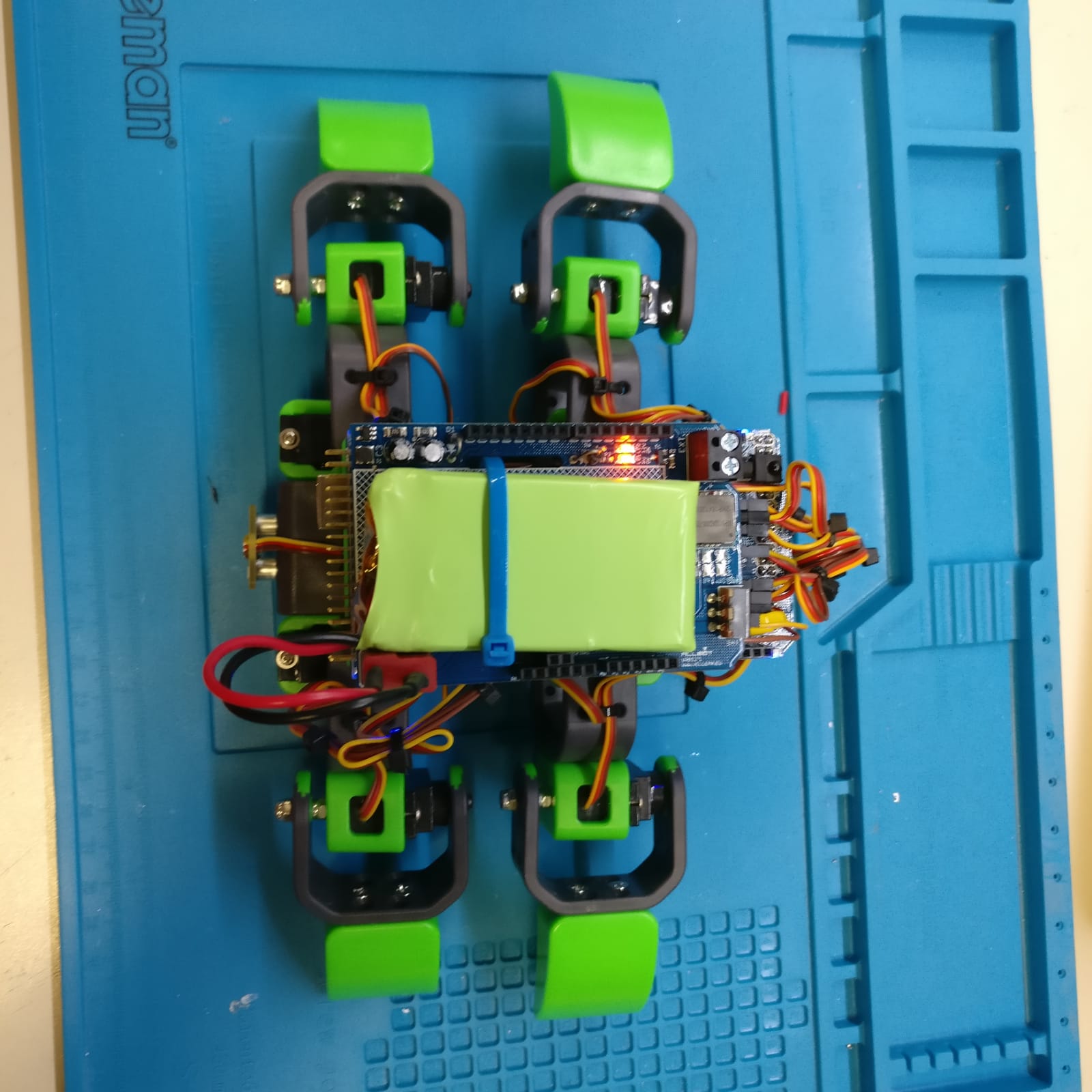
Can you post a picture of the servoshield which shows cleary where each wire of the servo goes to?
I suspect some servo’s aren’t properly connected, please double check the wiring and check in the example sketch if you don’t need to flip the servo(programmatically).
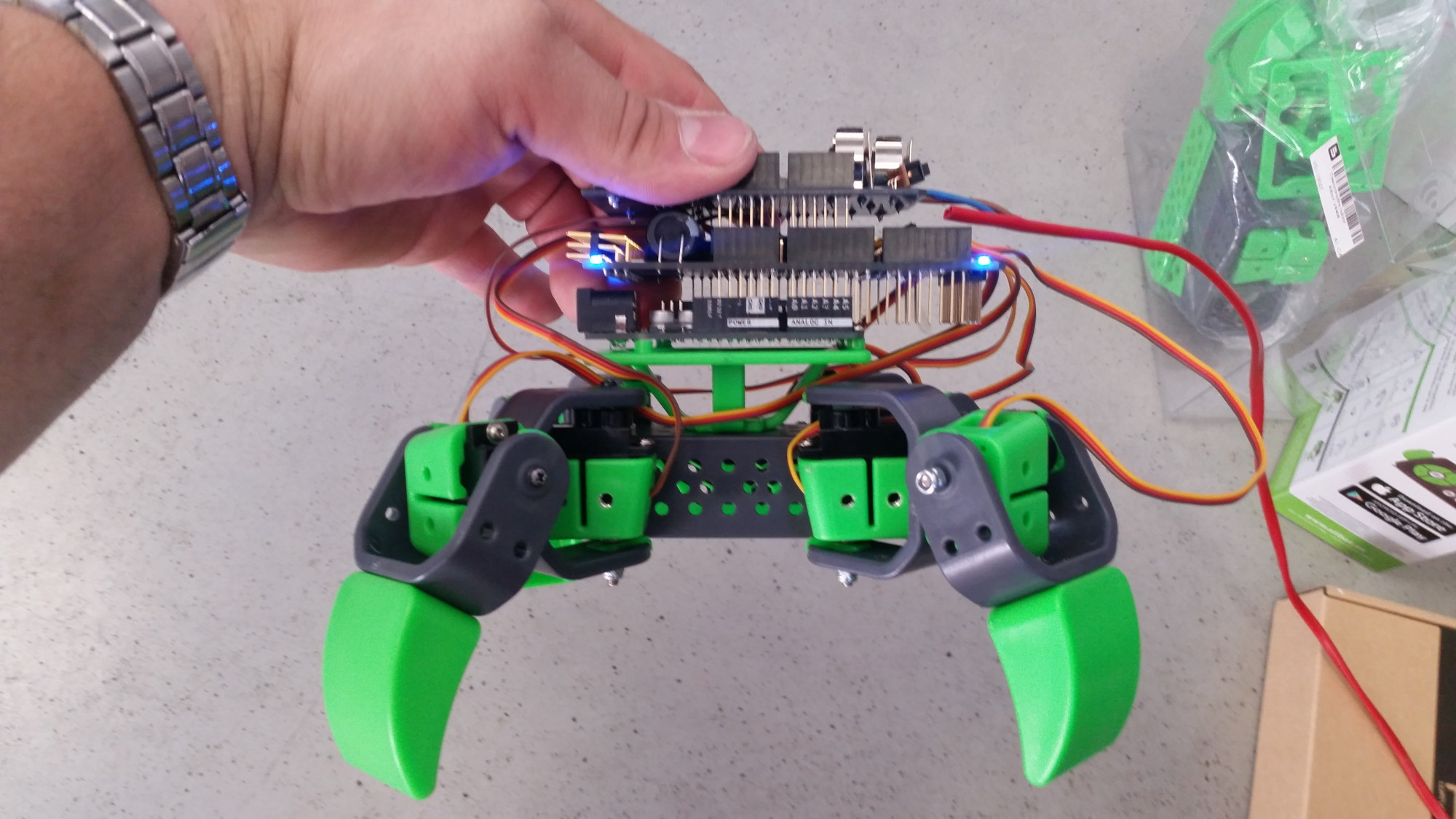
Power the allbot make sure it stands up.
Remove the power.
Now check the movement of the hips. how far can you manually move the hips?
If you can’t get the full range of motion out of it. It means the plastic part is attached at an incorrect angle.
Please then remove the small black screw that connects the servo and the plastic part. Put the part under the correct angle should be around 45 degrees now. And fasten it.
Centering a servo just sets the servo under the correct angle. when you then mount the plastic parts it assures it’s under a correct angle.
When I disconnect power, I have full range of hips.
Second picture which I sent you show robot with example sketch with:
BOT.attach(hipFrontLeft, A1, 90, 0, 0);
BOT.attach(hipFrontRight, A0, 90, 1, 0);
BOT.attach(hipRearLeft, 9, 90, 1, 0);
BOT.attach(hipRearRight, 4, 90, 0, 0);
I think this is problem with centering, because every servos is moving. But I don;t know how robot should look like at the beginning with original example sketch. Can you give me a movie?