Hello @Karlo_2006 ,
Try these thins on: https://manuals.whadda.com/article.php?id=407
or see below:
Please note: Make sure the IR RECEIVE/PROGRAM switch is set to IR RECEIVE.
WHAT DOES THE PROGRAM / IR RECEIVE SWITCH DO
The VRSSM SHIELD has a small switch, which let’s you choose between PROGRAM and IR RECEIVE. As the name implies, when you want to program the arduino when the VRSSM SHIELD is connected you will have to flip that switch to PROGRAM. If you do not do that the ARDUINO IDE will have trouble uploading your code. If you however want the robot to react to IR messages from the VR001 IR MODULE you will have to change the switch to IR RECEIVE (after you have loaded the correct code offcourse).
Slide the Switch SW1 (marked in yellow) to IR RECEIVE SIDE:
If this not help check the volume of media (smartphone) see below:
02. HOW TO USE
In this part of the manual we will explain how to use the VR001 IR TRANSMITTER and how the ALLBOT application works.
UPLOAD THE CORRECT CODE TO YOUR ROBOT
First you have to make sure that your robot is running the correct firmware so it knows how to react to the commands that the ALLBOT applications sends. Our example sketches have this functionality but you will have to change one line of code to make the robot listen to these commands. Also do not forget that after you learn how the robot interprets these commands you are completely free to change the code and let your robot do different things!
These instructions will explain how to use the example sketch with the VR001 IR TRANSMITTER for the VR408 but the process is similar for other robots. These instructions also assume you know how to program your robot, if you don’t please follow the instructions on this section of the manual: 4. Understanding the firmware .
- Download the example sketch for the VR408 here: 5. Example sketches .
- Search for the line of code that contains:
boolean IRreceive = false; // Set this to true if you want to use the IR remote
- Change that line to the following:
boolean IRreceive = true; // Set this to true if you want to use the IR remote
- Make sure the IR RECEIVE/PROGRAM switch is set to PROGRAM.
- Load this code to the ARDUINO UNO.
- Make sure the IR RECEIVE/PROGRAM switch is set to IR RECEIVE.
- Power your robot up.
- It should stand up and make the startup noise, then it will do nothing because it is waiting for an IR command.
USING THE VR001
Tested devices for the VR001 IR transmitter:
- all Apple smatphones and tablets
- Samsung galaxy s6
- Samsung galaxy s5 mini
- Samsung galaxy s4
- Samsung galaxy s4 mini
- Galaxy Tab 10.1 pro
- Asus Nexus 7
- Oneplus one
- Huawei G620
- LG L Fino
- Sony Z1
- Samsung S3
- BQ Aquaris E10 tablet
We are quite sure that there are a lot of other similar devices that are also compatible with the VR001. If you have one of those devices, please let us know via forum.velleman.eu so we can add them to the list.
IR transmitter problems:
Are you experiencing problems such as an automatically blinking light, no reaction, noise problems, etc.? Don’t worry, this can be fixed quite easily. The only thing you need is a solder station and some solder, then follow the instructions below:
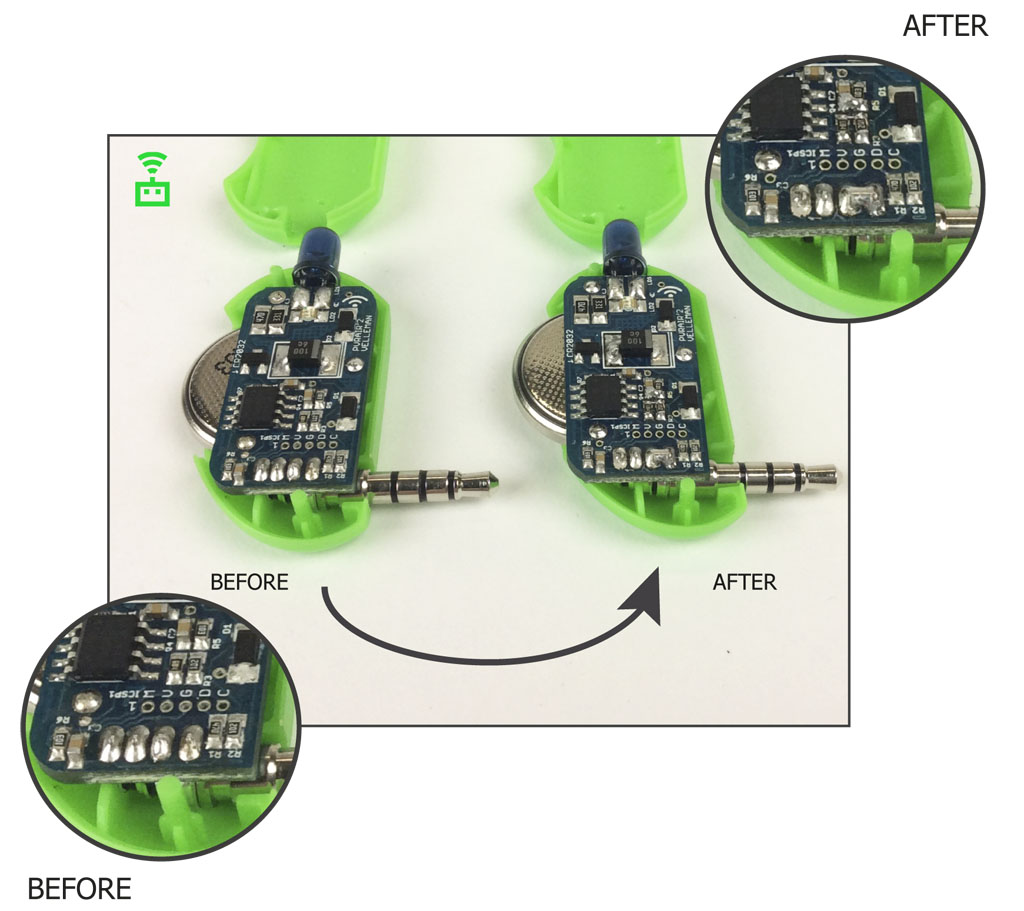
- Step 1: remove the battery from the IR transmitter
- Step 2: gently open up the IR Transmitter (this can be done with the aid of a flat screwdriver)
- Step 3: solder the two pins which are closest to the jack together (see picture)
IOS DEVICE:
- Plug the VR001 into the audioport of your device.
- Make sure your device is not set to silent/vibrate.
- Make sure your device is not set to use EQ sound enhancements in the Settings → Music → EQ menu
- Open the ALLBOT application.
- Adjust the volume to 3/4 of maximum and check if the light on the VR001 flashes when you press a button in the application. Increase or decrease the volume until the light flashes when you press a button.
- Start your robot (make sure the IR RECEIVE/PROGRAM switch is set to IR RECEIVE).
- The robot should know execute the commands you send it by pressing the buttons in the application.
If the robot is not doing anything or if it only works sometimes, try increasing or decreasing the (media) volume of your device. Also make sure the IR receiver on the back of the robot can “see” the VR001.
ANDROID DEVICE:
- Plug the VR001 into the audioport of your device.
- Make sure your device is not set to silent/vibrate.
- Make sure your device is not set to use any EQ sound enhancements.
- Open the ALLBOT application.
- Adjust the media volume to maximum and check if the light on the VR001 flashes when you press a button in the application. Increase or decrease the (media)volume until the light flashes when you press a button.
- Start your robot (make sure the IR RECEIVE/PROGRAM switch is set to IR RECEIVE).
- The robot should know execute the commands you send it by pressing the buttons in the application.
If the robot is not doing anything or if it only works sometimes, try decreasing the (media) volume of your device. Also make sure the IR receiver on the back of the robot can “see” the VR001.
Best Regards,
Velleman Support
